Movement data in GIS #36: trucks from space
Can we reliably measure truck traffic from space? Compared to private transport, spatiotemporal data on freight transport is even harder to come by. Detecting trucks using remote sensing has been a promising lead for many years but often required access to pretty specialized sensors, such as TerraSAR-X. That is why I was really excited to read about a new approach that detects trucks in commonly available Sentinel-2 imagery developed by Henrik Fisser (Julius-Maximilians-University Würzburg, Germany). So I reached out to him to learn more about the possibilities this new technology opens up.

To verify his truck detection results. Henrik had already used data from truck counting stations along the German autobahn network. However, these counters are quite rare and thus cannot provide full spatial coverage. Therefore we started looking for more complete reference data. Fortunately, Nikolaus Kapser at the Austrian highway corporation ASFINAG offered his help. The Austrian autobahn toll system is gantry-based. It records when a truck passes a gantry. Using the timestamp of these truck passages and the current traffic speed, it is possible to estimate truck locations at arbitrary points in time, such as the time a Sentinel-2 image was taken. This makes it possible to assess the Sentinel-2-based truck detection along the autobahn network for complete Sentinel-2 images.
Overall, Sentinel-2-based detections tend to underestimate the number of trucks. Henrik found a strong correlation (with an average r value > 0.8) between German traffic counting stations and trucks detected by the Sentinel-2 method. These counting stations were selected for their ideal characteristics, including distance from volatile traffic situations such as a high number of highway intersections. This is very different from our comparison which covers autobahn sections in and near Vienna. We therefore expected larger detection errors. However, our new Austrian analysis reaches similar results (with r values of 0.79, 0.70, and 0.86 for three different days 2020-08-28, 2020-09-22, and 2020-11-06).
Thanks to the truck reference locations provided by ASFINAG, we were also able to analyze the spatial distribution of truck detections. We decided to compare ASFINAG data (truth) and Sentinel-2-based detections using a grid based approach with a cell size of 5×5 km. Confirming Henrik’s original results, grid cells with higher detection than ground truth values are clearly in the minority. Interestingly, many cells in Vienna (at the eastern border of the image extent) exhibit rather low relative errors compared to, for example, the cells along Westautobahn (the east-west running autobahn in the center of the image extent).
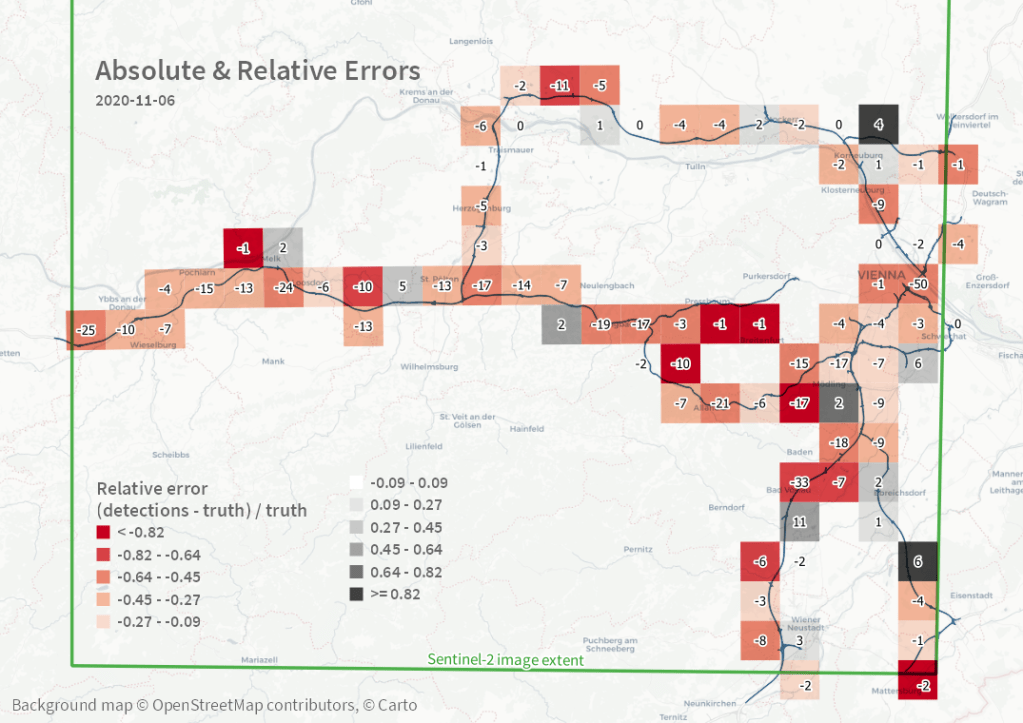
Some important remarks: The Sentinel-2-based detection method only works for large vehicles moving around 50km/h or faster. It is hence less suited to detect trucks in city traffic. Additionally, trucks in tunnel sections cannot be detected. To enable a fair comparison, we therefore flagged trucks in the ground truth dataset that were located in tunnels and excluded them from the analysis. Sentinel-2 captures the region around Vienna around 10:00 o’clock in the morning. As a result, it is not possible to assess other times of day. Finally, cloud cover will reduce the accuracy. Therefore we picked images with low reported cloud cover percentage (< 5%).
It is really exciting to finally see a truck detection method that works with readily available remote sensing data because this means that it is potentially transferable to other areas of the world where no official traffic counts are available. Furthermore, this method should be in line with data protection regulations (avoiding identification of individuals and potential reconstruction of movement trajectories) thus making it possible to use and publish the resulting data without further anonymization steps.
This post was written in collaboration with Henrik Fisser (Uni Würzburg / DLR) and Nikolaus Kasper (Asfinag MSG). Keep your eyes open for upcoming detailed publications on the Sentinel-2-based method by Henrik.
This post is part of a series. Read more about movement data in GIS.
